Objective
This was my high school final project.
The aim was to develop a fully functional, authentically moving bionic hand. The costs
should remain low and the most basic technology should be used, on the one hand to ensure
replicability and on the other hand to be able to present the technology in a way that
everyone can understand.
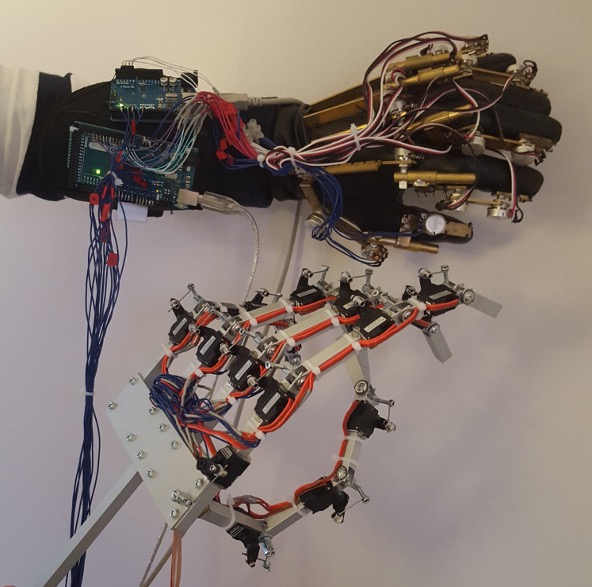
The glove and robot hand.
Result
The result is a fully functional robot hand that adequately reproduces the hand movements of
the sensor glove wearer. Due to the sensor spacing on the glove, the joint spacing is given
and the hand can only be controlled by a person with similar hand proportions to mine. In
addition, the wearer's freedom of movement is slightly restricted by the size of the
sensors. Since the sensor system is connected to the motor system via cables, the distance
between these two components is limited. I wanted to implement the project with the simplest
possible means, but had to switch from the pre-programmed RC technology to a microcontroller
system to improve the accuracy, but I think that this technology is also easily accessible
and understandable for everyone. This example of directly controlled robotics can be used
wherever one cannot/must not be at the scene of the action, for example to defuse
bombs, handle toxic chemicals or (further on) take on personal protection tasks (IRON MAN).