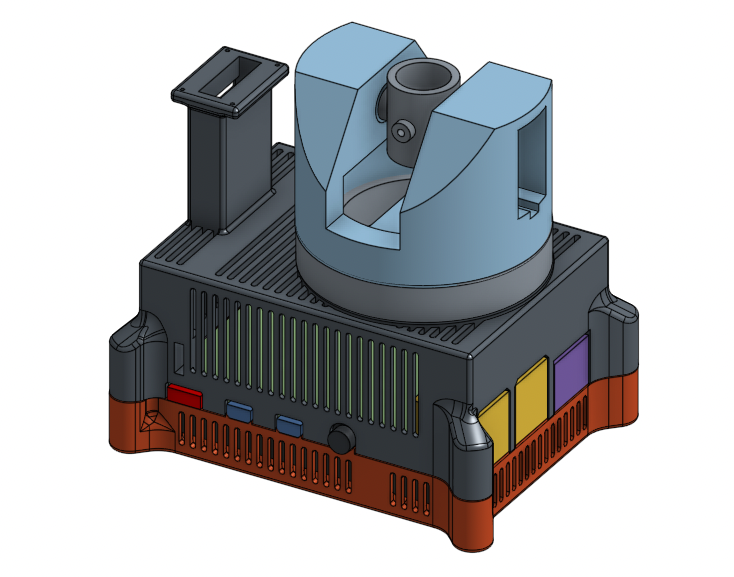
CAD drawing of the tower.
Software
I started with the detection algorithm, testing with my laptop webcam and a black painted bb gun ball. To keep the computational load on the Raspberry low and enable high framerate, no ML is involved, the detection works trough pixel gradients. To approximate the gradient, the last frame is subtracted from the current frame. The result is gaussian filtered to reduce the influence of noise, and the suspected position of the mosquito is taken as the position of the maximum change value in the image. If the position makes for a plausible trajectory of the mosquito (meaning that it is not too far from the last estimated position), the trajectory counter is increased, otherwise it is set to 0. If the trajectory counter is at the threshold value, it is considered likely that we are indeed tracking a mosquito and the FLAK is ready to fire. When there is no movement between two frames and the FLAK is ready to fire, it shoots the laser at the last known position of the mosquito, assuming that it is sitting on a wall. To map between pixel coordinate of the mosquito and servo position of the laser, the surveilled area is mapped beforehand. The laser is shot at equally spaced intervals of the servo postions and the pixel coordinates of the beam are recorded. This gives a rough mapping between servo positions and pixel coordinates, that has to be inverted. Pixel coordinates between the grid points are interpolated.Hardware
For the hardware I took a CAD plan of a case for the Raspberry Pi and designed the cannon tower and camera mount on top of it.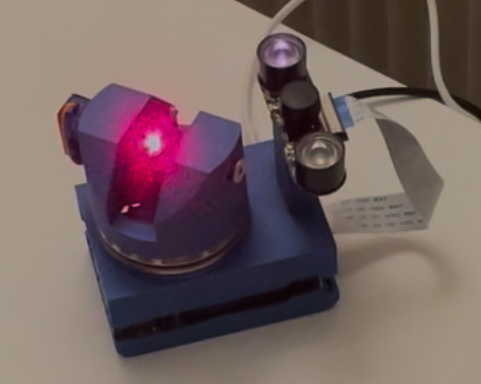
First prototype.